Research
Research topics in our lab:
|
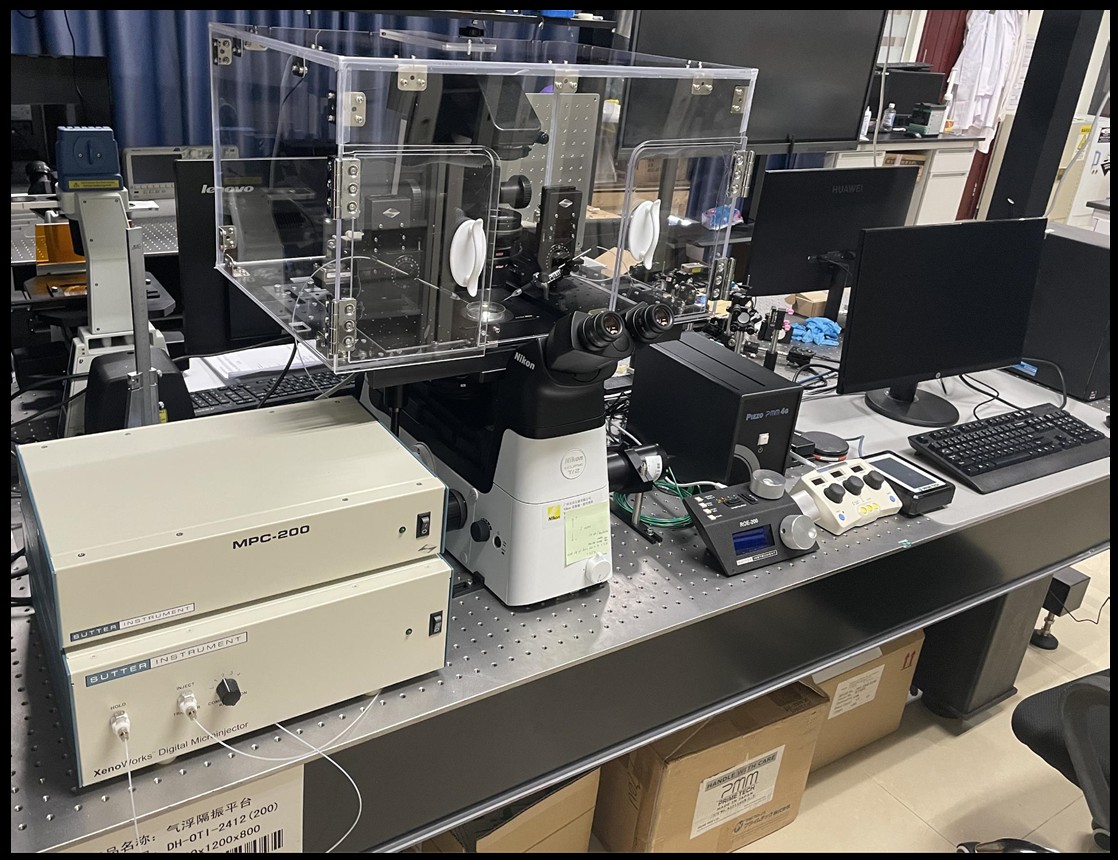
Automated Robotic Micromanipulation for Cell Surgery Automated cell surgery is a technique that uses robotic micromanipulation systems to perform targeted interventions on individual living cells, such as modifying cellular structures, extracting or injecting materials. Our laboratory is particularly dedicated to the automation of robot-assisted embryo biopsy for preimplantation genetic testing (PGT) in in vitro fertilization technology (IVF).
|
|
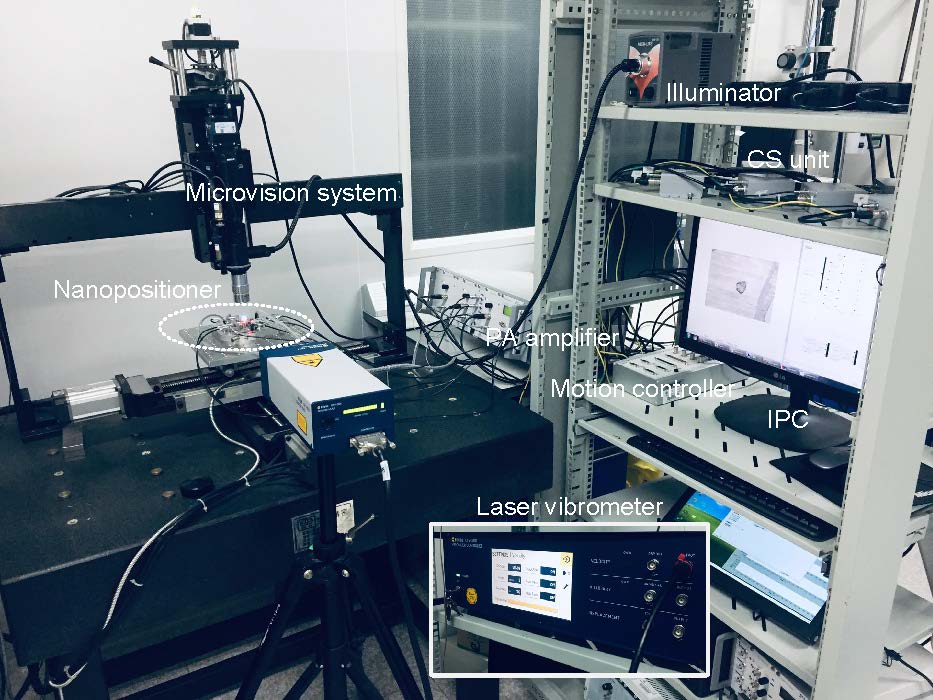
Multimodal Optical Microscopy Multimodal optical microscopy combines multiple imaging techniques into one system, providing advantages such as deeper and higher-resolution subsurface imaging, simultaneous visualization of structural and functional information from cellular components. This allows for more comprehensive, accurate, and reliable visual sensing for robotics systems by offering complementary data that is not possible with single-modality optical microscopy.
|
|
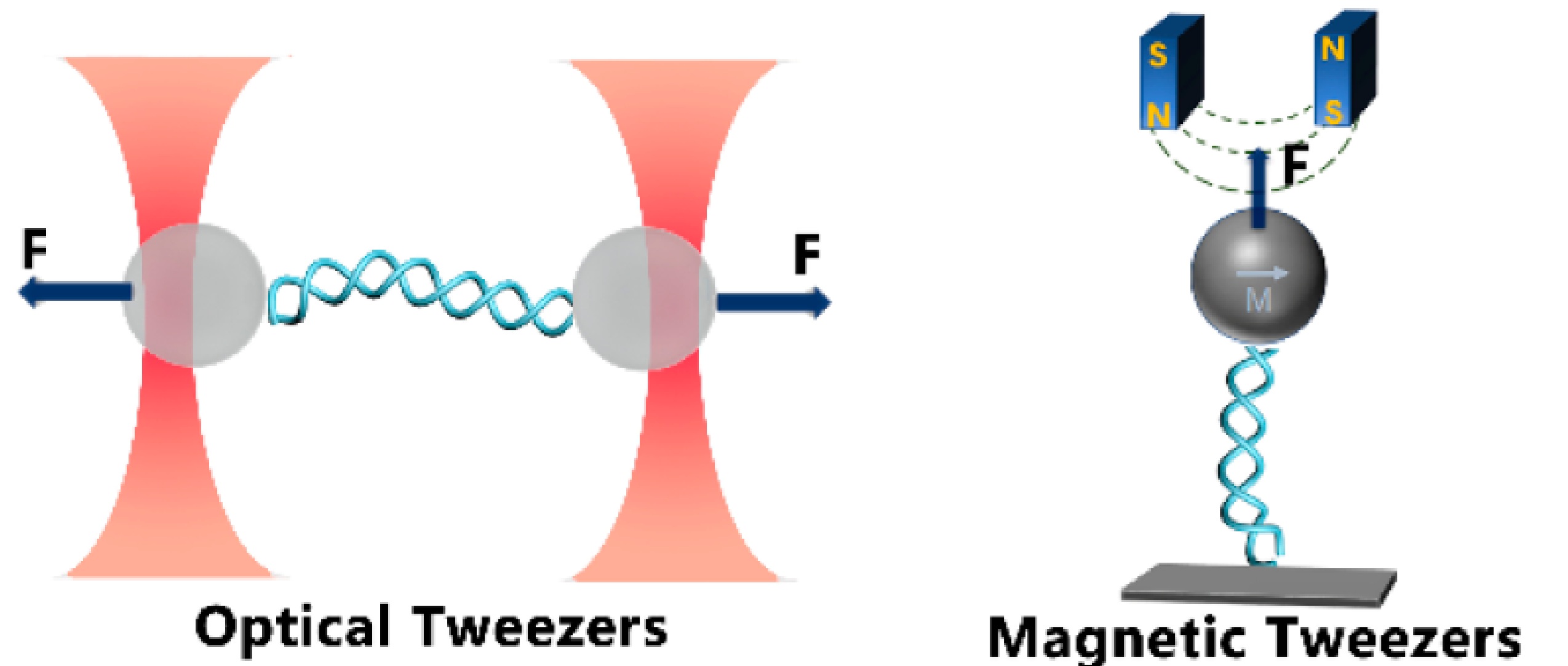
Biomedical Field-driven Micromanipulation Systems Field-driven micromanipulation, such as optical tweezers and magnetic tweezers, enables exquisitely precise, non-contact manipulation of single cells and even subcellular components without physical contact, minimizing contamination and mechanical damage. Convergence of these technologies into next-generation, multi-modal platforms will unlock unprecedented capabilities in biological research and medical treatment.
|
Please refer to the publications page for more information.